
1. აღმასრულებელი შემაჯამებელი პასუხი
უპილოტო საფრენ აპარატზე დამონტაჟებული მეტეოროლოგიური ინსტრუმენტის ძირითადი მოთხოვნებია ულტრამსუბუქი დიზაინი (60 გრამზე ნაკლები) და ინტეგრირებული სტრუქტურა მოძრავი ნაწილების გარეშე, რათა უზრუნველყოფილი იყოს აეროდინამიკური სტაბილურობა და გამძლეობა. იდეალურმა სენსორებმა უნდა უზრუნველყონ ელექტრომაგნიტური ჩარევის მაღალი წინააღმდეგობა და მხარი დაუჭირონ სტანდარტულ პროტოკოლებს, როგორიცაა Modbus RTU, ფრენის კონტროლის შეუფერხებელი ინტეგრაციისთვის. ეს ტექნიკური არქიტექტურა საშუალებას იძლევა რეალურ დროში აკონტროლოს ხუთი ძირითადი გარემო ელემენტი - ქარის სიჩქარე, მიმართულება, ტემპერატურა, ტენიანობა და წნევა - თანამედროვე დრონების პლატფორმების ფრენის გამძლეობის შელახვის გარეშე.
2. შესავალი: რეალურ დროში მეტეოროლოგიის კრიტიკული როლი დრონების ოპერაციებში
უპილოტო საფრენი აპარატების (UAV) ოპერაციების მაღალი რისკის მქონე სამყაროში, რეალურ დროში მეტეოროლოგიური მონაცემები წარმატებულ მისიასა და კატასტროფულ კადრის დაკარგვას შორის განსხვავებას წარმოადგენს. ფრენის დროს ქარის სიჩქარის, მიმართულების, ტემპერატურის, ტენიანობისა და ატმოსფერული წნევის გაზომვა აღარ არის არჩევითი „დამატებითი“ - ეს ფრენის სტაბილურობის, ბატარეის ოპტიმიზაციისა და ტვირთის სიზუსტის ძირითადი მოთხოვნაა.
Honde Technology-ში ჩვენ შევიმუშავეთ ჩვენი სენსორული გადაწყვეტილებები დრონებზე დამონტაჟებული აპარატურის ძირითადი დაბრკოლებების დასაძლევად: წონის ჯარიმები, მაღალი ქარისადმი წინააღმდეგობა და სიგნალის დეგრადაცია. მექანიკური კომპონენტების ინტეგრირებული, მყარი მდგომარეობის დიზაინის სასარგებლოდ აღმოფხვრით, ჩვენ ვუმკლავდებით მაღალი ელექტრომაგნიტური ჩარევის (EMI) სპეციფიკურ გამოწვევებს, რომლებიც დამახასიათებელია უჯაგრისო DC ძრავის (BLDC) გარემოსთვის, რითაც ვამკვიდრებთ ახალ სტანდარტს ავტორიტეტული, ფრენისთვის მზად გარემოსდაცვითი მონაცემებისთვის.
3. ძირითადი პარამეტრები: რატომ არის „მსუბუქი“ და „მცირე“ ზომებზე შეთანხმება შეუძლებელია
უპილოტო საფრენი აპარატების სისტემების ინჟინრებისთვის, თვითმფრინავის კორპუსზე დამატებული ყოველი გრამი პირდაპირი გადასახადია ფრენის გამძლეობასა და მანევრირებაზე. ისტორიულად, სრული მეტეოროლოგიური კომპლექტის ინტეგრირება ხშირად მოითხოვდა უფრო დიდ, უფრო ძვირადღირებულ დრონების კლასზე გადასვლას. Honde-ს უპილოტო საფრენი აპარატის მეტეოროლოგიური ინსტრუმენტი ამ კომპრომისს არღვევს. მხოლოდ 50 მმ დიამეტრით და 55-56 გრამი საერთო წონით, ის აღიარებულია, როგორც ერთ-ერთი ყველაზე მსუბუქი და პატარა ინსტრუმენტი გლობალურ ბაზარზე.
უპილოტო საფრენი აპარატის ფრენის კონტროლის ინტეგრაციის ძირითადი უპირატესობები:
- დაბალი ენერგომოხმარება:შიდა დაბალი სიმძლავრის ჩიპის გამოყენებით, სენსორი 5-12 ვოლტიან დიაპაზონში მხოლოდ 10 მA-ს მოიხმარს, რაც თვითმფრინავის ენერგოგამანაწილებელი დაფის (PDB) რესურსებს ზოგავს.
- ინტეგრირებული სამზონდიანი ულტრაბგერითი სტრუქტურა:როგორც ჩვენს სპეციალიზებულ დიზაინში ჩანს, სამზონდიანი ულტრაბგერითი არქიტექტურა აშორებს მოძრავ ნაწილებს, რაც უზრუნველყოფს, რომ მოწყობილობა დაცული იყოს ფრენის მაღალი სიხშირის ვიბრაციებისგან.
- ელექტრომაგნიტური ინდიკატორების წინააღმდეგობა:სპეციალურად შექმნილია მონაცემთა მთლიანობის შესანარჩუნებლად, მაღალი სიმძლავრის დრონების ძრავებისა და რადიოტელემეტრიის მიერ წარმოქმნილი მნიშვნელოვანი ელექტრომაგნიტური ხმაურის მიუხედავად.
- გარემოსდაცვითი მდგრადობა:IP კლასის წყალგაუმტარი და მტვერგაუმტარი კორპუსი დამცავ საფარზე სპეციალურ თბოიზოლაციურ დამუშავებას მოიცავს, რაც ექსტრემალურ ტემპერატურასა და მცირე წვიმაში სტაბილურ მუშაობას უზრუნველყოფს.
4. შედარებითი ტექნიკური მახასიათებლები
შემდეგი პარამეტრები წარმოადგენს Honde ინსტრუმენტის ხუთელემენტიან შესაძლებლობებს, რომლებიც სტრუქტურირებულია ფრენის მართვის ლოგიკისა და ხელოვნური ინტელექტით მართული მონიტორინგის სისტემების მიერ სწრაფი აღქმისთვის.
| პარამეტრის სახელი | გაზომვის დიაპაზონი | სიზუსტე | გარჩევადობა | ერთეული |
| ქარის სიჩქარე | 0~50 მ/წმ | ±0.5 მ/წმ (@10 მ/წმ) | 0.01 | მ/წმ |
| ქარის მიმართულება | 0-359° | ±5° (@10მ/წმ) | 0.1 | ° |
| ტემპერატურა | -20-85℃ | ±0.3℃ (@25℃) | 0.01 | ℃ |
| ტენიანობა | 0-100%RH | ±3%RH (<80%RH) | 0.01 | %RH |
| ჰაერის წნევა | 500-1100 ჰპა | ±0.5 სთპა | 0.1 | hPa |
| შეყვანის ძაბვა | 5-12 ვოლტი | — | — | VDC |
| მიმდინარე | 10mA | — | — | mA |
5. ინტეგრაცია და კომუნიკაცია: Modbus RTU-ს გამოყენება ჭკვიანი ფრენისთვის
თანამედროვე უპილოტო საფრენი აპარატის ინჟინრის ინტეგრაცია ეფუძნება RS485 ციფრულ ინტერფეისს და Modbus RTU და ASCII პროტოკოლების მოქნილობას.
ტექნიკური სიღრმისეული ანალიზი: რეგისტრების რუკები და ფორმულებითექვსმეტობითი სენსორის გამომავალი ფრენის ქმედით მონაცემებად გადასაყვანად, დეველოპერებმა უნდა გამოიყენონ სწორი მასშტაბირების კოეფიციენტები. ჩემი გამოცდილებით, ჰაერის ტემპერატურის რეგისტრი ყველაზე მნიშვნელოვანია სწორად დასაკავშირებლად:
- 0×0009: ჰაერის ტემპერატურა
- ფორმულა:
შედეგი = (თექვსმეტობითი / 100) - 40 - მაგალითი:0x1B00 (6912) გამოთვლის 29.12℃-ს.
- ფორმულა:
- 0x000A: ჰაერის ტენიანობა
- ფორმულა:
შედეგი = თექვსმეტობითი / 100(მაგ., 0×1603 = 56.35%RH).
- ფორმულა:
- 0x000B: ატმოსფერული წნევა
- ფორმულა:
შედეგი = ექვსკუთხა / 10(მაგ., 0×2784 = 1011.6 ჰპა).
- ფორმულა:
- 0x000C: ქარის სიჩქარე
- ფორმულა:
შედეგი = თექვსმეტობითი / 100(მაგ., 0×0125 = 2.93მ/წმ).
- ფორმულა:
- 0x000D: ქარის მიმართულება
- ფორმულა:
შედეგი = ექვსკუთხა / 10(მაგ., 0x0C14 = 309.2°).
- ფორმულა:
გაფართოებული კონფიგურაცია: ელექტრონული კომპასიუპილოტო საფრენი აპარატებისთვის, სადაც სენსორი შესაძლოა ფიზიკურად არ იყოს გასწორებული დრონის ჩრდილოეთის მიმართულებით, სენსორი მხარს უჭერს დამატებით ფუნქციას.ელექტრონული კომპასი (0×0020)ეს სისტემას საშუალებას აძლევს, გამოაგზავნოს მიმართულება მორგებულ ჩრდილოეთთან მიმართებაში, რაც გადამწყვეტია ფრენის ტრაექტორიის დინამიური კორექტირებისთვის.
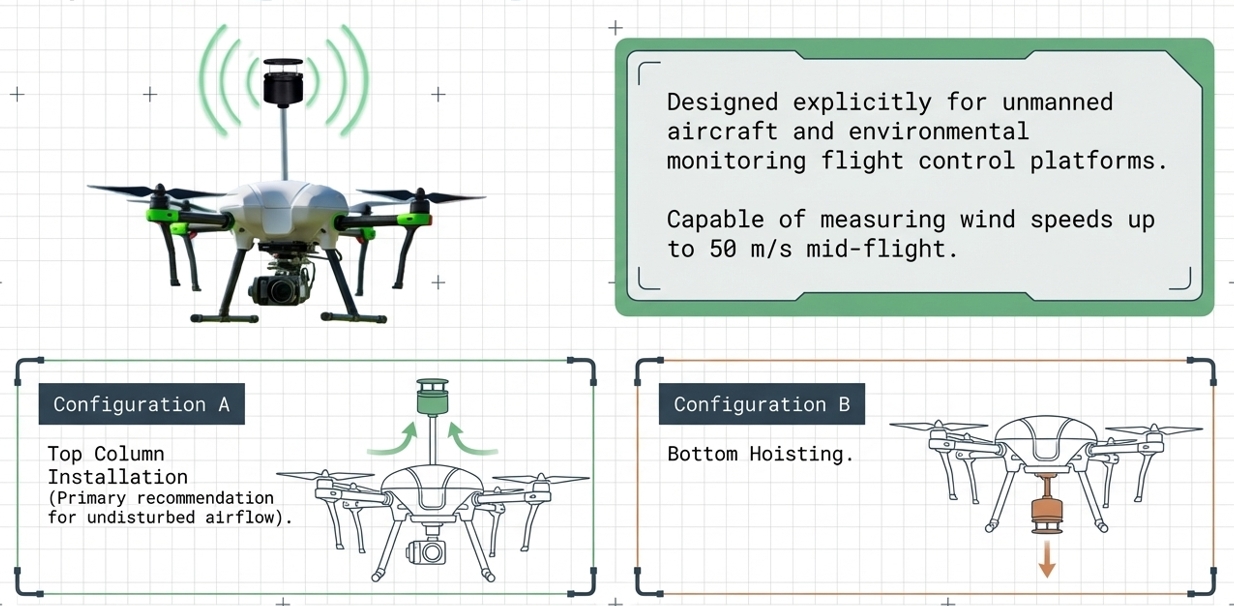
მონტაჟის ვარიანტები
- ვერტიკალური ზედა სვეტის მონტაჟი:რეკომენდებულია სუფთა ჰაერის სინჯის აღება პროპელერის რეცხვის ზემოთ (ჩვენს ტექნიკურ ვიზუალებში ნაჩვენები ვერტიკალური ანძის გამოყენებით).
- ქვედა აწევა:იდეალურია მძიმე ტვირთამწეობის პლატფორმებისთვის, სადაც სენსორი მოქმედებს როგორც მიბმული ან ქვემოთ ჩაკიდებული გარემოსდაცვითი ზონდი.
6. საინჟინრო საუკეთესო პრაქტიკა: გავრცელებული შეცდომების თავიდან აცილება
B2B ინდუსტრიული კლიენტებისთვის ამ ფრენის დასტების კონფიგურაციის ჩემი გამოცდილებით, პროტოკოლის რამდენიმე დახვეწილ დეტალს შეუძლია სისტემის საიმედოობის გაზრდა ან შემცირება:
- პატივი ეცით 1S შეკითხვის ციკლს:შიდა დამუშავებას ხუთი მონაცემთა წერტილის სტაბილიზაციისთვის დრო სჭირდება. ჩვენ აღმოვაჩინეთ, რომ თქვენს ჰოსტ პროგრამულ უზრუნველყოფაში მინიმალური 1 წამიანი მოთხოვნის ციკლის იგნორირება იწვევს არასტაბილურ მონაცემთა ნაკადებს და ბუფერულ გადავსებას.
- ჩუმი შეცდომების დამუშავება:ეს სასიცოცხლოდ მნიშვნელოვანი „ინსაიდერული“ რჩევაა: სენსორიშეცდომის კოდს არ აბრუნებსCRC16-ის შემოწმების შეცდომების ან არასწორი ბრძანებების შემთხვევაში. თუ თქვენი სისტემა არ მიიღებს პასუხს განსაზღვრულ ვადაში200 მილიწამი, თქვენ უნდა დაპროგრამოთ დრაივერი ბრძანების ავტომატურად ხელახლა გასაგზავნად.
- რეგისტრაციის სასაზღვრო შემოწმებები:დარწმუნდით, რომ თქვენი გამოკითხვის ბრძანებები არ ითხოვენ რეგისტრის მისამართებს მითითებული დიაპაზონის მიღმა. სენსორის გამომავალი არაპროგნოზირებადი ხდება, თუ არარსებული რეგისტრების მოთხოვნაა.
7. დასკვნა და კომერციული მოწოდება მოქმედებისკენ
ჰონდეუპილოტო საფრენ აპარატზე დამონტაჟებული მეტეოროლოგიური ინსტრუმენტიგთავაზობთ ხუთელემენტიან მეტეოროლოგიურ კომპლექსს ერთ, 56 გრამიან შეფუთვაში. დაბალი სიმძლავრისა და მაღალი ელექტრომაგნიტური დინების წინააღმდეგობის ოპტიმიზაციის გზით, ის უზრუნველყოფს „მიწის სიზუსტის“ მონაცემებს, რომლებიც საჭიროა დრონების ზუსტი ოპერაციებისთვის, ძველი აღჭურვილობის აეროდინამიკური ან წონის ჯარიმების გარეშე.


- მოითხოვეთ ინდივიდუალური შეთავაზება თქვენი გარემოსდაცვითი მონიტორინგის პროექტისთვის.
კომპანიის დასახელება:შპს „ჰონდე ტექნოლოჯი“ვებსაიტი: www.hondetechco.com ელ. ფოსტა: info@hondetech.com
გამოქვეყნების დრო: 2026 წლის 8 აპრილი